



Home > Drone UAV > Miltirotor > D2000S Is A Small, Long-endurance, High-precision Mapping, Remote Sensing And Video Applications Of Multi-rotor UAV



D2000S Is A Small, Long-endurance, High-precision Mapping, Remote Sensing And Video Applications Of Multi-rotor UAV
- Item No. : D2000S
Features & Applications
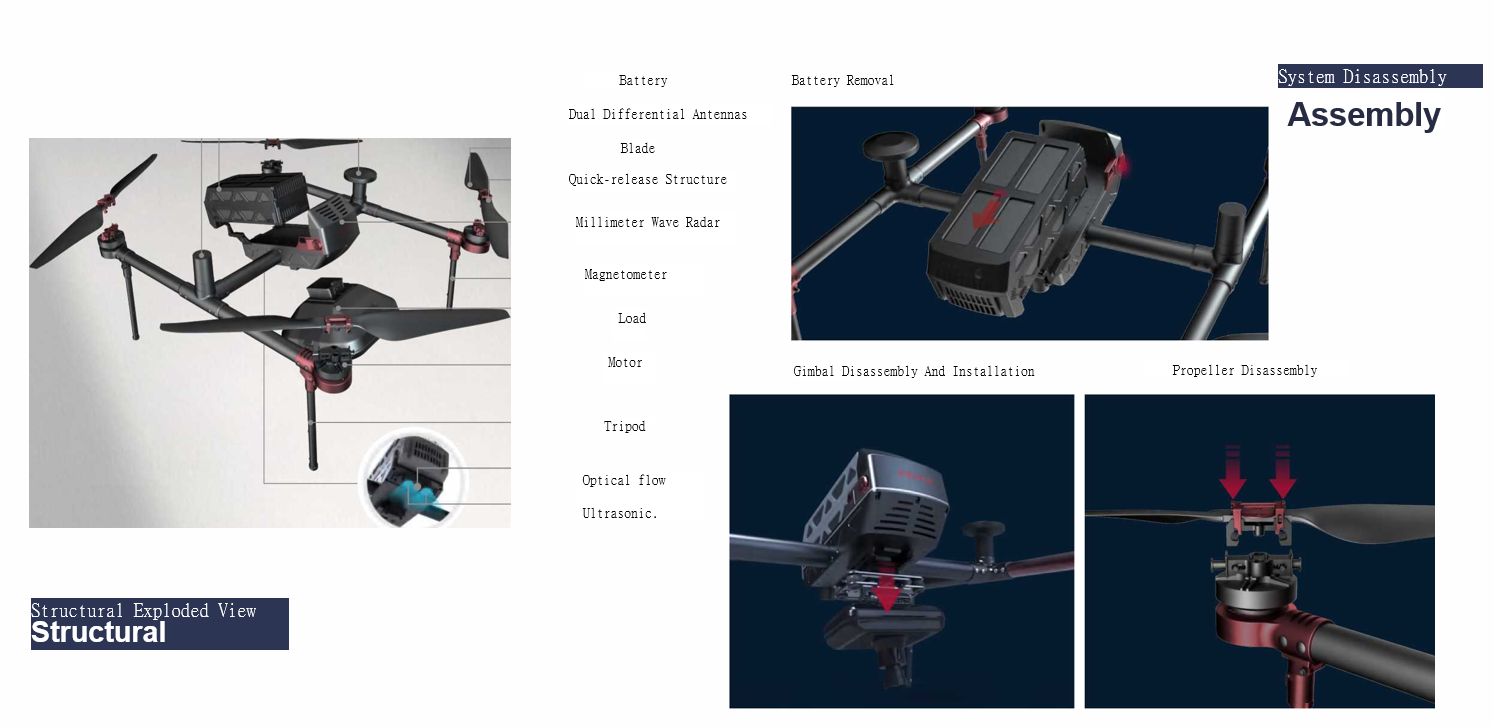
● The mission load of the D2000S adopts modular design, with aerial measurement module, tilt module, thermal infrared remote sensing module
● It can meet the applications of aerial survey, true three-dimensional model, and remote sensing monitoring
● Equipped with high-precision differential GNSS board and dual differential antenna, as well as standard network RTK, PPK and its fusion solution services
● Support accurate 3D route planning and 3D real-time flight monitoring
- Inquiry now
Technical Specifications
|
D-CAM2000 AERIAL SURVEY MODULE |
Camera Model |
SONYa6000 |
|
Effective Pixels |
24.3 million |
|
|
Sensor Size |
23.5x15.6mm(aps-c) |
|
|
Lens Parameters |
25mm fixed focus |
|
|
D-CAM3000 AERIAL SURVEY MODULE |
Camera Model |
SONY a7Rm4 |
|
Effective Pixels |
61 million |
|
|
Sensor Size |
35.7x23.8mm (full frame) |
|
|
Lens Parameters |
40mm fixed focus |
|
|
D-OP3000 TILT MODULE |
Camera Model |
SONY a6000 |
|
Effective Pixels |
Approx. 24.3 million x 5 pixels |
|
|
Sensor Size |
23.5x15.6mm(aps-c) |
|
|
Lens Focal Length |
25mm fixed focus (down view) 35mm fixed focus (tilt) |
|
|
D-EOV1000 VISIBLE LIGHT VIDEO MODULE |
Video Movement |
|
|
Video Resolution |
1920x1080 |
|
|
Video Frame Rate |
25fps |
|
|
Zoom |
30x optical zoom |
|
|
Sensor Size |
1/4 inch |
|
|
Stabilizing Gimbal |
Three-axis augmentation PTZ |
|
|
Onboard Video Storage |
Yes |
|
|
Encoding Format |
h264 |
|
|
Data Size |
7.5GB/h |
|
|
Continuous Recording Duration |
2h |
|
|
Graph Transmission Parameters |
||
|
Compression Standard |
H.264 |
|
|
Transport Protocol |
Private protocol (AES256/AES128 data encryption as required) |
|
|
Operating Band |
2.3GHz~2.7GHz |
|
|
Transmit Power |
100mW~300mW |
|
|
Channel Broadband |
10MHz |
|
|
Transmission Distance |
10km |
|
|
D-OP4000 TILT MODULE |
The Camera Model |
SONY A7R4 |
|
Number Of Sensors |
5 |
|
|
Tilt Angle |
45° |
|
|
Resolution |
9504*6336 |
|
|
Effective Pixels |
Approx. 61 million * 5 pixels |
|
|
Cell Size |
3.76μm |
|
|
Sensor Size |
35.7×23.8mm |
|
|
Lens Focal Length |
40mm fixed focus (down view) 56mm fixed focus (strabismus) |
|
|
D-MSPC2000 MULTSPECTRAL MODULE |
Sensor Parameter |
CMOS: 1/3" global shutter |
|
Effective Pixels |
1.2 million |
|
|
Resolution |
1280×960 |
|
|
Sensor Size |
4.8mm×3.6mm |
|
|
Focal Length |
5.2mm |
|
|
Field Of View |
HFOV: 49.6°, VFOV: 38° |
|
|
Aperture |
F/2.2 |
|
|
Quantize The Number Of Bits |
12 bits |
|
|
Shooting Speed |
1 time/second |
|
|
Typical Width |
110m * 83m@AGL = 120m |
|
|
Ground Resolution |
GSD: 8.65cm/pix, AGL: 120m |
|
|
D-LIDAR3000 LIDAR MODULE |
Measuring Distance |
200m |
|
Adjustable |
within 360° scan angle |
|
|
Scan Speed |
5/10/20 lines/sec |
|
|
Spot Frequency |
320 kHz |
|
|
Number Of Echoes |
Double echoes |
|
|
POS Attitude Accuracy Rolling |
pitching 0.006° heading 0.03° |
|
|
Optical Camera Effective Pixels Pixel Size |
24 million 3.9 μm |
|
|
D-LIDAR2000 LiDAR MODULE |
Horizontal Field Of View |
70.4° |
|
Vertical Field Of View |
4.5°/77.2° |
|
|
Accuracy |
5cm@50 |
|
|
Ranging |
190m@10% |
|
|
Reflectance |
@100klx450m@80% Reflectance @0klx |
|
|
Ranging Mode |
TOF |
|
|
Laser |
class 1 |
|
|
Wavelength |
905nm |
|
|
Spot Frequency |
240 kHz |
|
|
Number Of Echoes |
Three echoes |
|
|
Echo Intensity |
8bitss |
|
|
Ranging Accuracy |
±2cm |
|
|
Horizontal Positioning Accuracy |
0.02m |
|
|
High Difference Positioning Accuracy |
0.03m |
|
|
Roll/pitch Accuracy |
0.006° |
|
|
Heading Angle Accuracy |
0.03° |
|
Related products




FOLLOW US


CopyRight © 2022 geodexinstrument.com Powered by semcms PHP 4.2